
 Dans cette partie, on va coder un peu, faire un code propre et présentable du côté PiRobot. Je vais également aborder la mise en forme de mes trames UDP ainsi que la parallélisassions des tâches sur le PiRobot avec l’utilisation du multithreading. Après quoi, on aura un PiRobot entièrement pilotable via le réseau Wifi ! Je veux également faire un point sur l’avancement du client sur tablette Windows qui avance très doucement pour le moment, d’où un point de réflexion sur comment le PiRobot doit être piloté. Quelles stratégies sont à mettre en place pour que PiRobot obéisse au doigt et à l’œil ?
Dans cette partie, on va coder un peu, faire un code propre et présentable du côté PiRobot. Je vais également aborder la mise en forme de mes trames UDP ainsi que la parallélisassions des tâches sur le PiRobot avec l’utilisation du multithreading. Après quoi, on aura un PiRobot entièrement pilotable via le réseau Wifi ! Je veux également faire un point sur l’avancement du client sur tablette Windows qui avance très doucement pour le moment, d’où un point de réflexion sur comment le PiRobot doit être piloté. Quelles stratégies sont à mettre en place pour que PiRobot obéisse au doigt et à l’œil ?
Table des matières
1. Petit refactoring de code côté serveur
Je vais reprendre la définition d’introduction du Wiki sur le « code refactoring » ou le « réusinage de code » :
Le réusinage de code est l’opération consistant à retravailler le code source d’un programme informatique – sans toutefois y ajouter des fonctionnalités ni en corriger les bogues – de façon à en améliorer la lisibilité et par voie de conséquence la maintenance, ou à le rendre plus générique (afin par exemple de faciliter le passage de simple en multiple précision) ; on parle aussi de « remaniement ». Cette technique utilise quelques méthodes propres à l’optimisation de code, avec des objectifs différents.
Le terme réusinage est originaire du Québec. L’équivalent en anglais est code refactoring, parfois rendu par refactorisation, terme qui, selon l’OQLF (ndlr: Office québécois de la langue française), est à éviter.
Fin de l’instant culture 🙂
1.1. Une fonction unique pour piloter les moteurs
Pour piloter un moteur comme j’en ai envie, j’ai actuellement besoin de trois variables :
- Son n° de moteur (qui redirige sur son adresse PWM)
- Sa vitesse
- Le sens de rotation
Cela fait trois information à traiter par moteur, soit 3*4 = 12 informations à traiter. C’est-à-dire que notre trame qui circulera entre notre console de pilotage et le PiRobot devra contenir au minimum 12 informations qu’il faudra séparer et décoder. Or plus la trame est simple, plus il sera facile et rapide de la décoder ! C’est du gain de temps à la fois pour le développeur (#moi) et pour la machine.
Afin de réduire ce nombre d’info, je souhaitai réaliser une fonction unique permettant de directement piloter chaque moteur sans s’embêter à en changer le sens, mais en ajoutant un signe à la vitesse demandée :

En faisant cela je réduis le nombre d’information de 12 à 4, car je me repère ainsi :
- Le signe représentante mon sens de rotation par rapport à l’orientation du PiRobot (caméra à l’avant)
- La position de l’information dans la trame représente le n° du moteur à piloter
- Le nombre représente toujours ma vitesse
- 0 pour 0% de la puissance maximale du moteur
- 4096 pour 100% de la puissance maximale du moteur
Il faut également que je prenne en compte de la commande du sens de rotation des moteurs est inversé dans mon cas pour les moteurs arrière et avant. Plutôt que de le corriger de manière hardware, je corrige ça directement dans le code :
Ensuite je crée une fonction qui sera notre routine et qui balaiera chaque moteur en revue à tout instant. Nous récupérons les informations moteurs de la variable globale cons_pwm[5] (explications au prochain chapitre !).
1.2. Mise en forme et décodage de la trame UDP
La trame que la tablette enverra aura cette forme :
mot1;mot2;mot3;mot4;servomot1
Le séparateur entre les différentes informations sera le « point-virgule ».

Trame UDP reçue
En vert : déjà implémenté et testé dans le code.
En jaune : implémenté dans le code, reste à tester.
Afin de décoder les trames entrantes et donc de séparer les données grâce à l’information point-virgule, j’utilise le code suivant :
Ce code permet de récupérer chaque information dans un tableau contenant 5 Int32 signés : cons_pwm[5].
Le serveur UDP renverra ces informations-là :

Trame de retour UDP
Orange : Reste à implémenter et à tester.
Orange foncé : Reste à étudier, fera l’objet d’un article séparé.
Actuellement, cette trame est représentée par la variable string : « Etat PiRobot ». Je m’occuperais du retour de trame lorsque j’aurai une bibliothèque fonctionnelle pour obtenir l’information analogique du courant sur les moteurs.
Voici le code complet de la partie serveur UDP :
1.3. Parallélismes des tâches Serveur UDP et Commande PiRobot grâce au Multithread
Maintenant que nous avons nos deux parties de code distincts (serveur UDP et commande PiRobot), voyons comment on peut simplement faire tourner les deux morceaux de codes ensemble. Pour ce faire, il suffit d’appeler les fonctions crées en threads. Le serveur UDP décode les informations des trames entrantes et les stockent dans un tableau de Int32 qui nous sert de variable globale. C’est cette variable qui nous permet de transiter les informations d’un thread à l’autre.

Variable partagée entre deux threads
On crée les threads dans la fonction « main » et on les appelles jusqu’à la fin de leur exécution (ils n’ont théoriquement pas de fin, car les deux threads contiennent des boucles while infinie : une pour l’attente de message UDP, et l’autre pour la routine de contrôle du Robot).
A partir de là, il est déjà possible de piloter le PiRobot avec de simples trames UDP (via Packet Sender par exemple).
L’intégralité du code ci-dessous, à la date du 30/01/2017 :
2. Arrêt sur image : Interface client et check-list PiRobot serveur
En parallèle de la programmation sur le Raspberry Pi, j’ai un peu avancé sur l’interface client (un peu… hein ^^).
J’aimerai procéder par divers onglets :
- Connexion : affiche les informations de connexions au PiRobot et permet d’accéder aux informations brutes avec un afficheur texte qui permettrait de faire du Debug (contrôler les échanges de trames par exemple…).
- Pilotage : Ce sera mon interface de pilotage du PiRobot, avec un retour vidéo du PiRobot, des boutons pour avancer/reculer et contrôler la direction. Il faudra prévoir un contrôle de l’orientation de la caméra se trouvant sur le servomoteur.
- Statistiques : C’est ici que je veux pouvoir afficher des graphes et réaliser des enregistrements sur la consommation totale du PiRobot, les courbes de couples par moteurs, etc…
- Options : Une page permettant de modifier certaines options de l’interface client ou du serveur sur le PiRobot, comme l’activation d’un mode Debug « pas à pas » pour analyser les trames dans la page de connexion.
- Quitter : Ce bouton permettra de quitter l’application, car cette dernière est, bien entendue, lancée en plein écran sur ma tablette.
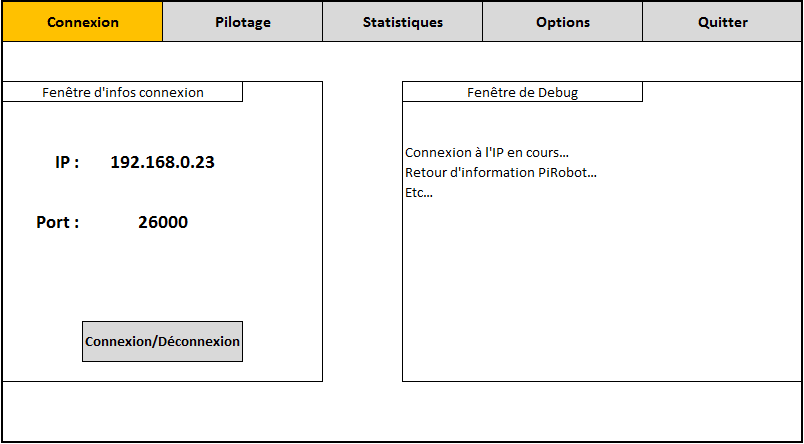
Maquette de la page de connexion (très sommaire ^-^)
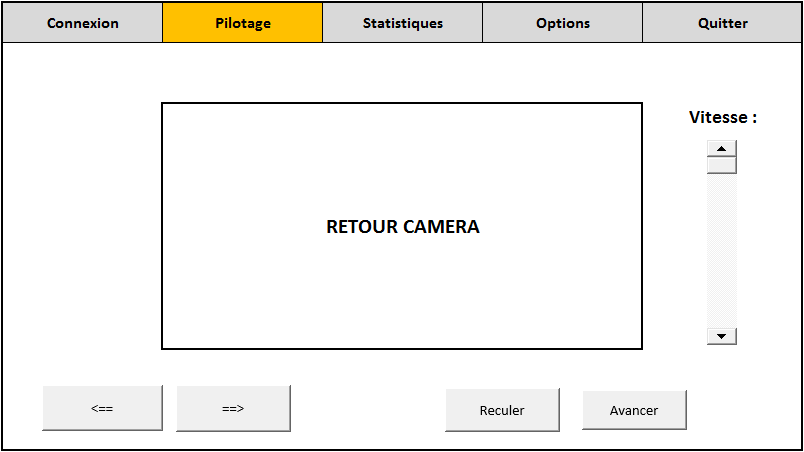
Maquette de la page pilotage (très sommaire également)
Premiers essais graphiques sous Visual Studio 2017 RC (et Studio Blend)
Il reste également beaucoup à faire côté serveur :
- [FAIT] Contrôle des moteurs
- [FAIT] Serveur UDP
- [FAIT] Interprétation des trames et multithreading
- Retour d’information sur le couple moteur
- Contrôle de la caméra
- Retour caméra
- Trame de retour UDP
3. Réflexions sur le pilotage du PiRobot
Comment sera piloté le PiRobot ? Ce dernier dispose de 4 moteurs :
- Avant gauche
- Arrière gauche
- Avant droit
- Arrière droit
Vu que les roues sont, de chaque côté, couplée par une chenille, on peut très bien, dans un premier temps piloter les moteurs droits et gauche ensemble :
- Côté gauche (moteurs 2 et 4)
- Côté droit (moteurs 1 et 3)
Je rappelle qu’un moteur est piloté comme suit :
Cmd_moteur(moteur, vitesse&sens) ;
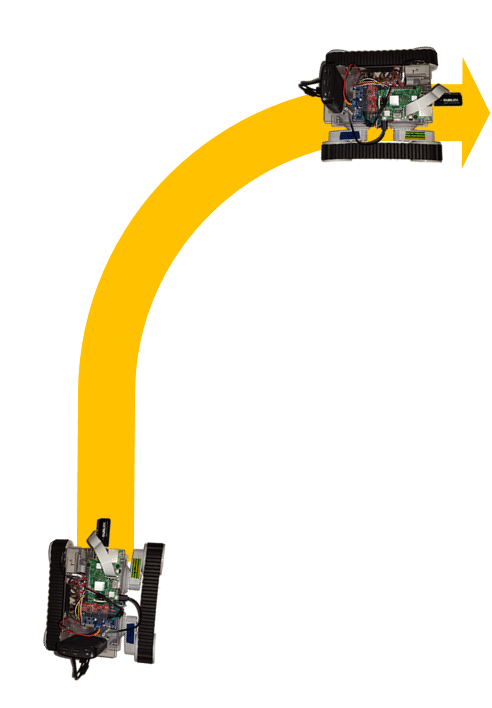
Je peux sans problème demander aux moteurs d’avancer dans une direction, d’arrêter le PiRobot, d’établir un angle de 90° à droite et de reprendre tout droit. J’aurai effectué un virage à droite. Bien.
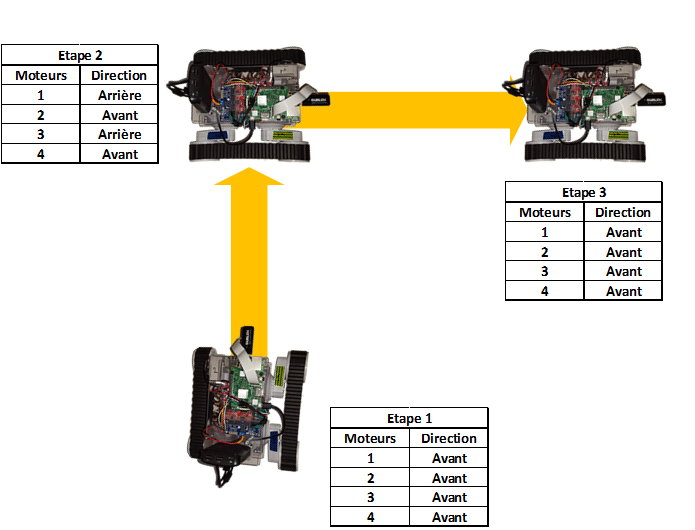
1er cas, très simple à gérer : aucun rayon de courbure, le robot effectue sa rotation sur place
Si maintenant je veux effectuer une courbe pour aller directement de l’étape 1 à l’étape 3 sans passer par l’étape 2, comment faire ? Comment réaliser une courbe ? Quel est le rayon de courbure que je peux réaliser ?
Dans la théorie, n’importe lequel.
Comportement plus naturel du PiRobot
Afin de réaliser ce comportement, il faudra que j’applique des coefficients de vitesse à chaque côté de moteurs. Et c’est ce coefficient qui va me déterminer ma courbe. Afin de définir la « force » du rayon de courbure, il faudra que je donne une valeur numérique à ma direction. C’est comme une voiture : plus vous tournez le volant, plus la voiture tourne. 3 choix s’offrent à moi :
- Diminuer le coefficient de vitesse aux moteurs situés du côté intérieur au virage
- Augmenter le coefficient de vitesse aux moteurs situés à l’extérieur du virage
- Les deux point ci-dessus à la fois
La troisième possibilité permet de régler les soucis lorsque l’on arrive aux valeurs extrêmes de l’échelle PWM (0 et 4096). En effet, si on est à l’arrêt et que l’on veut effectuer un demi-tour sur soi-même la 3ème option est préférable. Après pour les virages tout est une histoire de dosage. Une autre solution serait de contrôler, à la manière de certaines voitures téléguidées, la puissance moteur de chaque côté indépendamment et d’avoir 2 joysticks à un axe à contrôler, plutôt que deux boutons avancer/reculer et un « volant » gauche/droite, à la manière d’un jeu vidéo (qui était ma première approche).
Dans un jeu vidéo de voiture, le rayon de courbure d’une voiture qui tourne est calculée selon la vitesse du véhicule. Plus le véhicule sera rapide, plus il sera difficile de tourner. Ce comportement « arcade » tente de traduire le comportement réel de conduite. Or, avec le PiRobot, on ne dépassera pas les 15 km/h je pense, donc bon… Si je veux être précis, autant procéder de la sorte, et contrôler indépendamment chaque côté (avec un retour à 0 en cas de lâcher-prise, bien évidemment !).
Cet article m’a permis de poser la situation avant d’attaquer les prochaines grandes étapes de développement. De plus, vous êtes de plus en plus nombreux à me suivre et à me poser des questions sur ce projet ! Je vous invite à commenter ou à directement m’écrire à l’adresse suivante : contact_mail@bentek.fr
Bien cordialement, BenTeK.














0 commentaires